好玩的力学(1)
数学上向量加法的定义如下图所示。
又因为向量我们只关心它的大小和方向,因此具有平移不变性,将向量u平移后使其与向量v共起点,会发现合向量正好处在图中平行四边形的对角线上,我们把这种作两个向量和的方法叫做向量加法的平行四边形法则。
请你任意拖动A、B、C点观察向量的变化
通过实验,我们可以验证力的合成满足平行四边形定则,且力也有大小和方向,因此力的合成就可以用数学里的向量工具来方便地描述。
请你拖动B、C点改变两个分力的方向,拖动两个滑动条来改变两个分力的大小,观察合力的变化。
通过前面的学习,我们发现力的合成本质上就是几个向量的加法,几个向量如果方向不在一条线上,合力的计算较为麻烦,但如果分力都在一条线上,那么只要建个系后,所有一条线上的力的矢量和全部能化成标量的加减,下面这个交互界面将带你理解背后的原因,让你理解为什么在列牛顿第二定律时,我们往往是先建一个系,且一般是沿着a的方向建立,然后同向的力取正,反向的取负,全部加起来后等于ma即可。
下面,为了进一步搞清楚在做大题时正负号的秘密,深入理解公式的本质,我们不仅要理解“为什么如果分力都在一条线上,那么只要建个系后,所有一条线上的力的矢量和全部能化成标量的加减”,而且还要理解在运用运动学的其他公式时,涉及到速度和位移等其他矢量时也是如此。[br][br]而速度和位移经常是用差值呈现的,背后的本质是向量的减法,为此,我们先要搞清楚数学中向量是如何作减法的。[br][br]数学中定义了与向量[math]\vec{a}[/math]长度相等,方向相反的向量,叫做向量[math]\vec{a}[/math]的相反向量,记作-[math]\vec{a}[/math][br]有了这个定义以后,我们就可以结合向量加法的定义来计算向量的减法了。
请你任意拖动A、B、C三点,体会向量的减法
[br]我们知道,位移指的是初位置指向末位置的有向线段。并且物体做直线运动时,在建系后,末位置坐标减去初位置坐标后,得到的坐标差大小就是位移大小,正负号则表示与规定的正方向同向或者反向(这些都是课本上说过的内容),看到这些特点,我们不禁就想到它应该也可以用向量的运算来表达出来,事实也的确如此,我们定义位置矢量是从坐标原点指向物体所在位置的向量,那么位移就可以表达成末位置矢量和初位置矢量的差值,背后正是向量的减法运算。
通过拖动B点,让其和A、C处于同一条直线上,体会物体做直线运动时,在建系后,末位置坐标减去初位置坐标得到的坐标差大小就是位移大小,正负号则表示与规定的正方向同向或者反向
通过拖动B点,让其和A、C处于同一条直线上,体会物体做直线运动时,在建系后,速度的正负号则表示与规定的正方向同向或者反向
动态平衡
我们知道,当物体受三力作用而处于平衡时,表示三力关系的矢量图呈闭合三角形,即三个力矢量(有向线段)依次恰首尾相接,当物体所受三力有所变化而又维系着平衡关系时,这三个力构成的矢量三角形必须始终保证首尾相接,随着形状发生改变,比较不同形状的力三角形各几何边、角情况,我们对相应的每个力大小、方向的变化及其相互间的制约关系将一目了然。[br]三力动态平衡通常可分为三类情况:[br][b]类型I[/b] 三力中有一个力确定,即大小、方向不变(常常是重力),另一个力方向确定,而这个力的大小及第三个力的大小、方向变化情况待定[br][b]类型Ⅱ[/b] 三力中有一个力确定,即大小、方向不变(常常是重力),另一个力大小确定,而这个力的方向及第三个力的大小、方向变化情况待定[br][b]类型[/b][b]Ⅲ[/b] 三力中有一个力大小和方向确定,另二力方向变化有依据,判断二力大小变化情况。
数学中,三个首尾相接的向量和为零向量,A、B、C点可任意拖动
把三个向量换成力矢量,就可以研究三力平衡了。下面请你仅仅拖动E点,观察F2和F3的变化,加深对动态平衡类型1的理解;接着仅仅拖动B点,观察F1和F3的变化,加深对动态平衡类型2的理解。
[b]类型[/b][b]Ⅲ[/b]需要三力中有一个力大小和方向确定,另二力方向变化有依据,判断二力大小变化情况。而变化有依据的其中一种情形是夹角定,下面我们就来研究夹角定的情形。([b]若一个力大小方向确定,另外两个力的夹角确定——用三角形外接圆法)[/b][br]
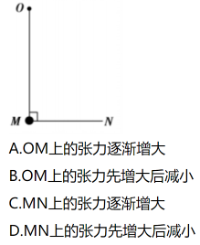
【例题1】如图所示,柔软轻绳ON的一端O固定,在其上某点M拴一重物,用手拉住绳的另一端N将重物向右上方缓慢拉起。初始时,OM竖直,OM⊥MN。保持OM与MN夹角不变,在OM由竖直被拉到水平的过程中()[br][br]
由于OM上的张力和MN上的张力始终垂直,而直径所对的圆周角为[math]90^\circ[/math],因此三个力构成的封闭矢量三角形可以放在一个圆中辅助分析。其中重力处在直径的位置。
向上拖动D点,观察随着绳子MN上的张力和竖直方向夹角逐渐增大的过程中,两个绳子上的张力的变化情况。
【例题2】(2017年全国卷一)如图,柔软轻绳[i]ON[/i]的一端[i]O[/i]固定,其中间某点[i]M[/i]拴一重物,用手拉住绳的另一端[i]N[/i],初始时,[i]OM[/i]竖直且[i]MN[/i]被拉直,[i]OM[/i]与[i]MN[/i]之间的夹角为[math]\alpha,\left(\alpha>\frac{\pi}{2}\right)[/math],现将重物向右上方缓慢拉起,并保持夹角不变。在[i]OM[/i]由竖直被拉到水平的过程中[br][br][br]
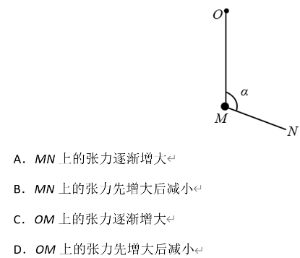
考虑到绳子OM和绳子MN上的张力夹角在首尾相连后是一个大小不变的锐角,而一个弦所对的圆周角也是不变的,因此此题也可以考虑放在圆里面辅助观察。